Kluczowe cechy
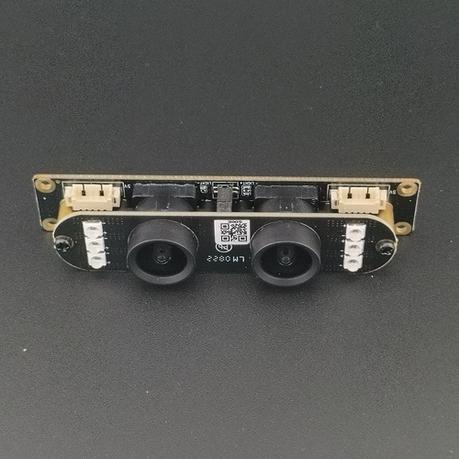
Podwójne czujniki RGB 5MP
Dwa dopasowane czujniki CMOS z globalną migawką 1/2,5″ rejestrują wyraźne kolorowe obrazy 2592×1944 z prędkością do 30 klatek na sekundę.Obliczanie głębokości w czasie rzeczywistym
Sprzętowo przyspieszane dopasowanie stereo oblicza mapy głębokości w czasie rzeczywistym. Obsługuje zakresy różnic do 200 px dla pomiarów na dużą odległość.Wysoka precyzja dokładności głębokości
Osiągnij rozdzielczość głębokości do 1-10 mm w zakresie roboczym 0,2 m–3 m (zależy od linii bazowej i warunków sceny).Elastyczne opcje interfejsu
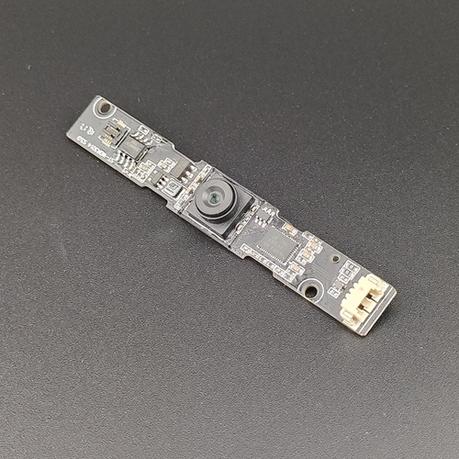
• USB2.0 do podłączenia i użycia na Windows/Linux/Android.Kompaktowy, wytrzymały design
38 × 30 mm PCB footprint z otworami do montażu na śruby; przemysłowa temperatura pracy od –20 °C do +70 °C.SDK i przykładowy kod
Kompleksowe sterowniki C/C++, Python i ROS do szybkiego prototypowania i wdrażania.
Korzyści i zastosowania
Robotyka i autonomiczne nawigowanie
Wykrywanie przeszkód, mapowanie SLAM i planowanie ścieżek z precyzyjnymi chmurami punktów 3D.Wizja Maszynowa i Inspekcja Jakości
Mierz wysokość obiektu, objętość i wady powierzchniowe na liniach produkcyjnych.AR/VR i Rozpoznawanie Gestów
Śledź ruchy rąk/twarzy dla immersyjnych, niskolatencyjnych interakcji.Skanowanie 3D i modelowanie
Stwórz dokładne cyfrowe bliźniaki małych i średnich obiektów.
Specyfikacje techniczne
| Specyfikacja | Szczegóły |
|---|---|
| Czujnik obrazu | 1/2.5″ 5MP Global-Shutter CMOS × 2 |
| Rozdzielczość | 2592 × 1944 |
| Częstotliwość klatek | Do 30 klatek na sekundę @ pełna rozdzielczość |
| Interfejs | USB 2.0 (UVC/UAC) |
| Zakres głębokości | 0,2 m do 3 m (podstawa 60 mm) |
| Głębokość Dokładność | ±0,5 mm przy 1 m |
| Mocowanie obiektywu | Stałe ogniskowanie, 75° HFOV |
| Zasilacz | 5 V DC, 500 mA |
| Wymiary | 38 × 30 × 12 mm (D×S×W) |
| Temperatura robocza | –20 °C do +70 °C |