Características Clave
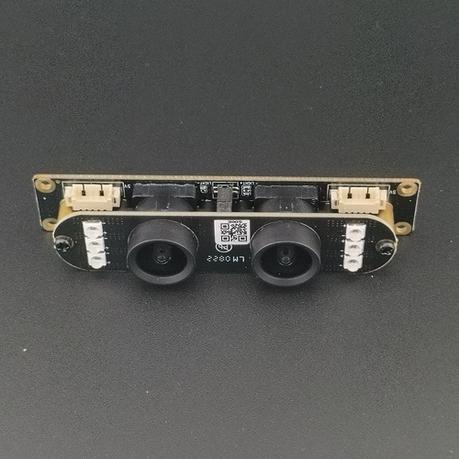
Sensores RGB duales de 5MP
Dos sensores CMOS de obturador global de 1/2.5″ emparejados capturan imágenes en color nítidas de 2592×1944 a hasta 30 fps.Cálculo de Profundidad en Tiempo Real
El emparejamiento estéreo acelerado por hardware calcula mapas de profundidad sobre la marcha. Soporta rangos de disparidad de hasta 200 px para mediciones a larga distancia.Alta Precisión en la Profundidad
Logre una resolución de profundidad de hasta 1-10 mm dentro de un rango de trabajo de 0.2 m–3 m (depende de la línea base y las condiciones de la escena).Opciones de Interfaz Flexible
• USB2.0 para conectar y usar en Windows/Linux/Android.Diseño Compacto y Robusto
38 × 30 mm huella de PCB con orificios para montaje con tornillos; temperatura de funcionamiento de grado industrial de –20 °C a +70 °C.SDK y Código de Ejemplo
Controladores completos de C/C++, Python y ROS para prototipado y despliegue rápidos.
Beneficios y Aplicaciones
Robótica y Navegación Autónoma
Detección de obstáculos, mapeo SLAM y planificación de rutas con nubes de puntos 3D precisas.Visión Artificial y Inspección de Calidad
Medir la altura del objeto, el volumen y los defectos de superficie en las líneas de producción.AR/VR y Reconocimiento de Gestos
Rastrear movimientos de manos/cara para interacciones inmersivas y de baja latencia.Escaneo y Modelado 3D
Cree gemelos digitales precisos de objetos pequeños a medianos.
Especificaciones Técnicas
| Especificación | Detalles |
|---|---|
| Sensor de imagen | 1/2.5″ 5MP Global-Shutter CMOS × 2 |
| Resolución | 2592 × 1944 |
| Tasa de Fotogramas | Hasta 30 fps @ resolución completa |
| Interfaz | USB 2.0 (UVC/UAC) |
| Rango de Profundidad | 0.2 m a 3 m (línea base 60 mm) |
| Precisión de Profundidad | ±0.5 mm a 1 m |
| Montura de lente | Enfoque fijo, 75° HFOV |
| Fuente de alimentación | 5 V CC, 500 mA |
| Dimensiones | 38 × 30 × 12 mm (L×W×H) |
| Temperatura de funcionamiento | –20 °C a +70 °C |