Recursos Principais
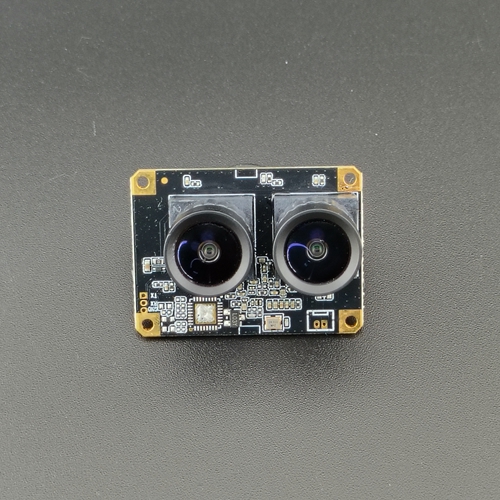
Sensores RGB Dual de 5MP
Dois sensores CMOS de obturador global 1/2,5″ combinados capturam imagens coloridas nítidas de 2592×1944 a até 30 fps.Cálculo de Profundidade em Tempo Real
A correspondência estéreo acelerada por hardware calcula mapas de profundidade em tempo real. Suporta faixas de disparidade de até 200 px para medições de longo alcance.Alta Precisão de Profundidade
Alcance resolução de profundidade de até 1-10 mm dentro de uma faixa de trabalho de 0,2 m–3 m (depende das condições de linha de base e cena).Opções de Interface Flexíveis
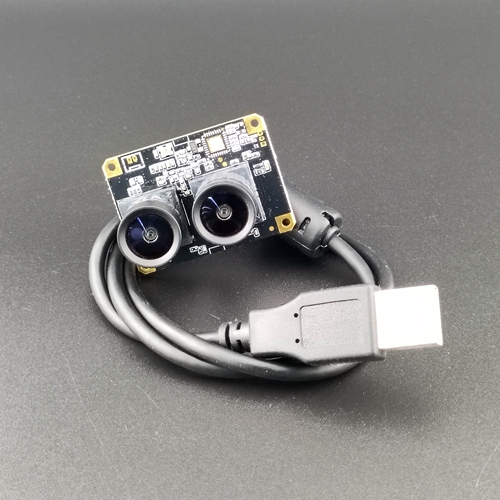
• USB2.0 para plug-and-play no Windows/Linux/Android.Design Compacto e Robusto
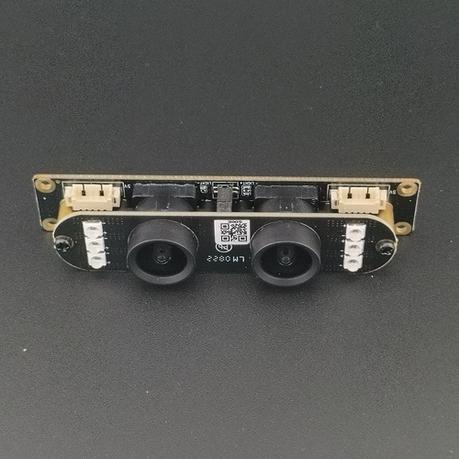
38 × 30 mm PCB footprint com furos para montagem com parafusos; temperatura de operação de grau industrial de –20 °C a +70 °C.SDK e Código de Exemplo
Drivers abrangentes de C/C++, Python e ROS para prototipagem rápida e implantação.
Benefícios e Aplicações
Robótica e Navegação Autônoma
Detecção de obstáculos, mapeamento SLAM e planejamento de trajetória com nuvens de pontos 3D precisas.Visão Computacional e Inspeção de Qualidade
Meça a altura, volume e defeitos de superfície dos objetos nas linhas de produção.AR/VR e Reconhecimento de Gestos
Rastrear movimentos das mãos/face para interações imersivas e de baixa latência.Digitalização e Modelagem 3D
Crie gêmeos digitais precisos de objetos pequenos a médios.
Especificações Técnicas
| Especificação | Detalhes |
|---|---|
| Sensor de Imagem | 1/2.5″ 5MP Global-Shutter CMOS × 2 |
| Resolução | 2592 × 1944 |
| Taxa de Quadros | Até 30 fps @ resolução total |
| Interface | USB 2.0 (UVC/UAC) |
| Faixa de Profundidade | 0,2 m a 3 m (linha de base 60 mm) |
| Profundidade Precisão | ±0,5 mm a 1 m |
| Montagem da Lente | Foco fixo, 75° HFOV |
| Fonte de Alimentação | 5 V CC, 500 mA |
| Dimensões | 38 × 30 × 12 mm (L×W×H) |
| Temperatura de Operação | –20 °C a +70 °C |