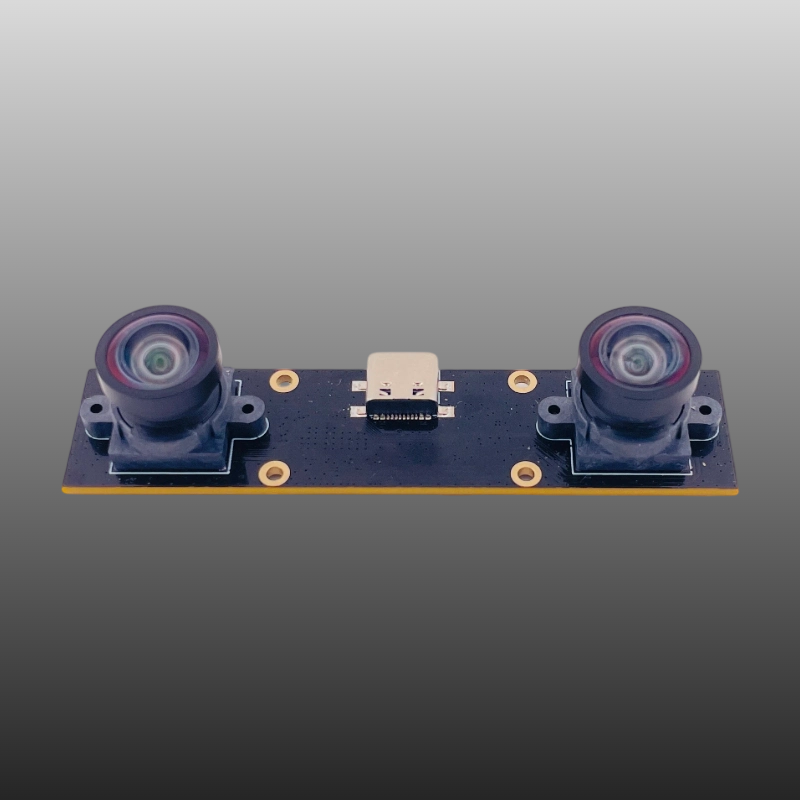



Trasforma l'imaging RGB standard in una visione 3D accurata con questo modulo compatto per telecamera stereo a doppio obiettivo da 2 MP. Dotato di doppi sensori RGB sincronizzati, il modulo acquisisce flussi di immagini sinistro e destro simultaneamente per generare informazioni di profondità in tempo reale e imaging stereoscopico per sistemi di visione AI, robotica, dispositivi smart e applicazioni embedded.
Progettato per l'integrazione OEM e industriale, il modulo offre un output sincronizzato stabile, trasmissione USB a bassa latenza e prestazioni affidabili di percezione della profondità in ambienti hardware compatti. Sistemi di telecamere stereo simili sono ampiamente utilizzati in robotica, riconoscimento facciale, AR/VR, visione artificiale, navigazione SLAM e piattaforme di automazione intelligente.
Punti salienti del prodotto
- Doppi sensori di immagine RGB da 2 MP per visione stereo
- Acquisizione frame sincronizzata per una ricostruzione 3D accurata
- Output immagine Full HD 2*1080P
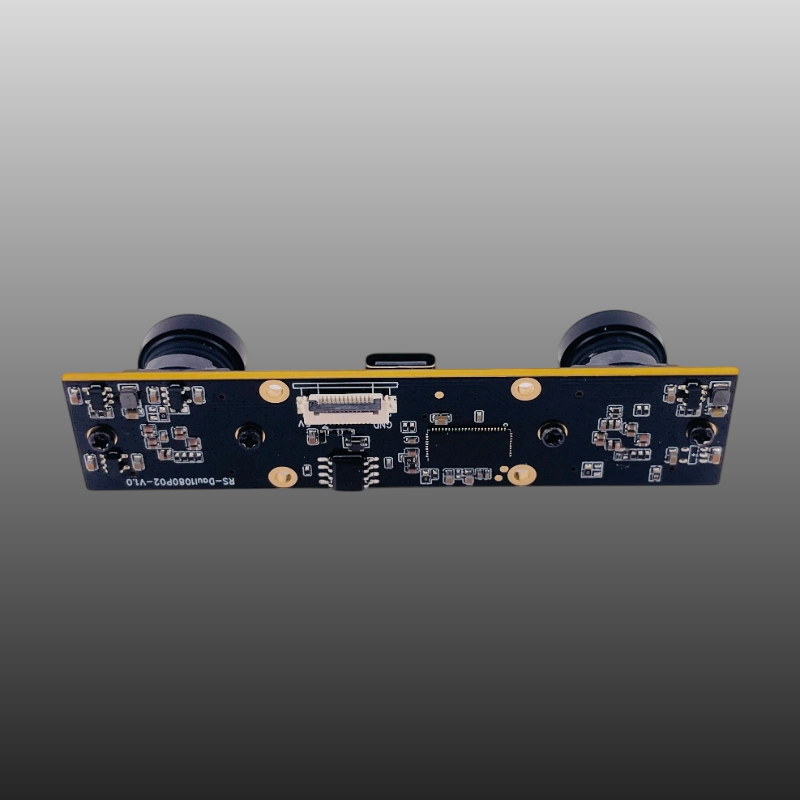
- Design compatto del PCB per integrazione embedded
- Interfaccia plug-and-play USB Type-C / USB 2.0
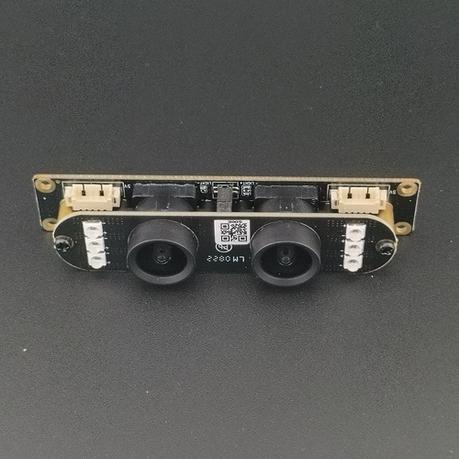
- Opzioni di lenti grandangolari a bassa distorsione
- Supporta piattaforme Windows, Linux, Android e embedded
- Ideale per applicazioni di visione artificiale, robotica, rilevamento della profondità e AR
Tecnologia di visione stereo
A differenza delle tradizionali fotocamere a lente singola, questo modulo fotocamera binoculare utilizza due telecamere RGB sincronizzate per catturare la disparità delle immagini tra le viste sinistra e destra. L'algoritmo di profondità elabora questi frame sincronizzati per generare informazioni spaziali e dati di imaging 3D.
Questo principio di imaging stereo consente:
- Misurazione della profondità
- Tracciamento oggetti
- Stima della distanza
- Mappatura 3D
- Riconoscimento gestuale
- Rilevamento del corpo umano
- Navigazione SLAM
- Posizionamento visione artificiale
L'imaging stereo sincronizzato è ampiamente adottato nei moderni sistemi di visione AI e nelle applicazioni robotiche grazie al suo basso consumo energetico, alla struttura compatta e alla capacità di profondità in tempo reale.
Specifiche chiave
| Articolo | Specifiche |
|---|---|
| Tipo di telecamera | Modulo telecamera stereo RGB duale |
| Risoluzione | 2MP × 2 |
| Risoluzione di output | 3840 × 1080 |
| Tecnologia di imaging | Immagini di profondità stereo |
| Sincronizzazione | Sincronizzazione frame dual-camera |
| Interfaccia | USB 2.0 / Type-C |
| Tipo di lente | Messa a fuoco fissa |
| Campo visivo | Obiettivo grandangolare opzionale |
| Formato immagine | MJPG / YUY2 |
| Sistemi operativi | Windows / Linux / Android |
| Dimensioni PCB | Personalizzabile |
| Alimentazione | Alimentazione bus USB |
| Temperatura operativa | Opzionale di grado industriale |
Scenari applicativi
AI e visione artificiale
Adatto per sistemi AI embedded che richiedono consapevolezza della profondità, riconoscimento di oggetti e analisi spaziale.
Robotica e Automazione
Fornisce dati di profondità stereo accurati per la navigazione robotica, l'evitamento degli ostacoli e il movimento autonomo.
Dispositivi AR / VR
Supporta l'imaging spaziale immersivo e il rilevamento ambientale in tempo reale per sistemi di realtà aumentata e virtuale.
Scansione e misurazione 3D
Abilita la ricostruzione della profondità stereo per ispezioni industriali, scansioni facciali e sistemi di misurazione intelligenti.
Dispositivi intelligenti
Ideale per terminali intelligenti, chioschi self-service, sistemi di controllo accessi e prodotti IoT intelligenti.
Supporto OEM e personalizzazione
Questo modulo fotocamera stereo supporta un'ampia personalizzazione OEM/ODM, tra cui:
- Selezione del sensore
- Personalizzazione delle dimensioni del PCB
- Regolazione FOV dell'obiettivo
- Opzioni di interfaccia USB / MIPI
- Configurazioni infrarossi o RGB
- Opzioni global shutter
- Integrazione dell'alloggiamento
- Ottimizzazione della calibrazione ISP
Soluzioni personalizzate di distanza stereo di base e sincronizzazione sono disponibili per applicazioni specializzate di imaging 3D.