Caratteristiche principali
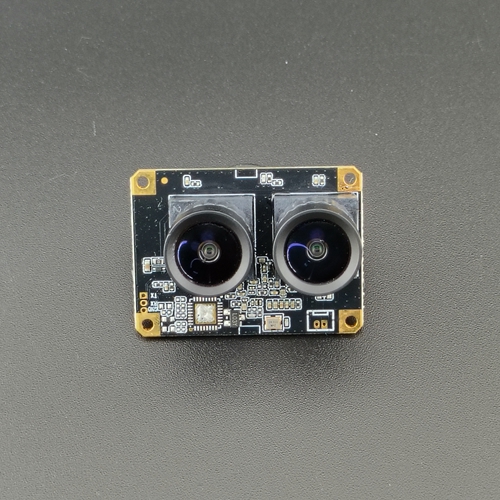
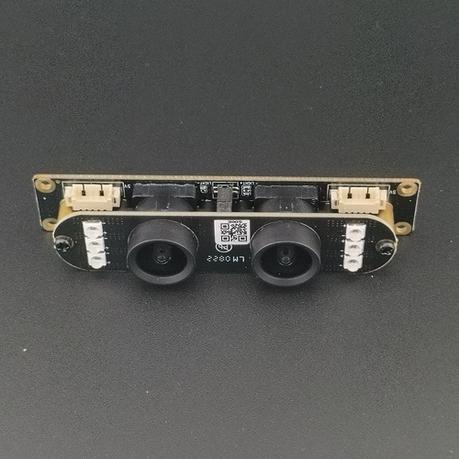
Sensori RGB dual da 5MP
Due sensori CMOS a otturatore globale 1/2.5″ abbinati catturano immagini a colori nitide 2592×1944 a fino a 30 fps.Calcolo della Profondità in Tempo Reale
La corrispondenza stereo accelerata dall'hardware calcola le mappe di profondità al volo. Supporta intervalli di disparità fino a 200 px per misurazioni a lungo raggio.Alta Precisione della Profondità
Raggiungi una risoluzione di profondità fino a 1-10 mm all'interno di un intervallo di lavoro di 0,2 m–3 m (dipende dalle condizioni di base e della scena).Opzioni di interfaccia flessibili
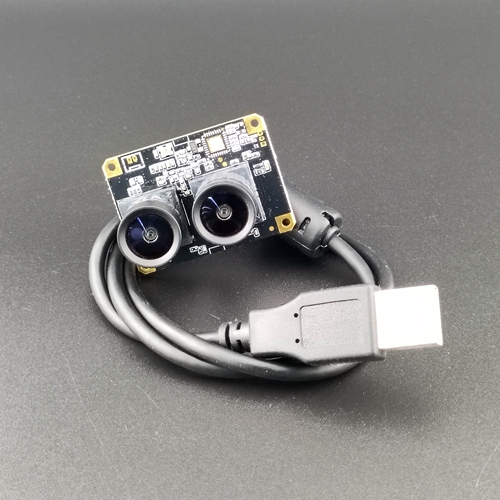
• USB2.0 per plug-and-play su Windows/Linux/Android.Design Compatto e Robusto
38 × 30 mm PCB footprint con fori per montaggio a vite; temperatura di funzionamento di grado industriale da –20 °C a +70 °C.SDK e Codice di Esempio
Driver completi per C/C++, Python e ROS per prototipazione rapida e distribuzione.
Benefici e Applicazioni
Robotica e Navigazione Autonoma
Rilevamento degli ostacoli, mappatura SLAM e pianificazione del percorso con nuvole di punti 3D precise.Visione Artificiale e Ispezione della Qualità
Misura l'altezza, il volume e i difetti superficiali degli oggetti sulle linee di produzione.AR/VR e Riconoscimento dei Gestualità
Traccia i movimenti delle mani/volto per interazioni immersive a bassa latenza.Scansione e Modellazione 3D
Crea gemelli digitali accurati di oggetti di piccole e medie dimensioni.
Specifiche Tecniche
| Specifiche | Dettagli |
|---|---|
| Sensore d'immagine | 1/2.5″ 5MP Global-Shutter CMOS × 2 |
| Risoluzione | 2592 × 1944 |
| Frequenza dei fotogrammi | Fino a 30 fps @ risoluzione completa |
| Interfaccia | USB 2.0 (UVC/UAC) |
| Intervallo di profondità | 0,2 m a 3 m (linea di base 60 mm) |
| Precisione di profondità | ±0,5 mm a 1 m |
| Attacco dell'obiettivo | Messa a fuoco fissa, 75° HFOV |
| Alimentazione | 5 V CC, 500 mA |
| Dimensioni | 38 × 30 × 12 mm (L×W×H) |
| Temperatura di funzionamento | –20 °C a +70 °C |